介紹
SmarAct的混合驅動將粘滑驅動和壓電掃描的優點結合在一個單一而緊湊的設備中。混合驅動結合了這兩種設備類型的優點,將一個專用的壓電掃描器集成到一個微小的粘滑位移臺中,而不是將兩個專用位移臺堆疊在一起。這帶來了一個優點,即粘滑驅動器和掃描驅動器都可以使用相同的反饋信號進行閉環定位。
請隨時瀏覽產品目錄的此部分,或向下滾動以獲取更多信息和應用示例。

DLS-3252 -混合驅動
基于SmarAct混合動力技術的小型線性位移臺,與SLS-32模塊化系統完全兼容。

DLS-5282 -混合驅動
混合驅動位移臺結合了長行程粘滑驅動位移臺和高分辨率壓電驅動位移臺的優勢。
SmarAct的混合驅動技術在一個緊湊的設備中結合了粘滑驅動和壓電掃描驅動的優勢。
雖然經典的粘滑驅動式位移臺可提供毫米級的行程,但其無振動的掃描范圍僅限于幾微米。另一方面,基于壓電掃描驅動的位移臺可提供更大的掃描范圍,但無法更改掃描區域的位置。

混合驅動器通過將專用的壓電掃描驅動器集成到SmarAct粘滑驅動位移臺中,而不是將兩個專用的位移臺堆疊在一起,從而結合了兩種設備的優點。
這帶來的優勢是,粘滑驅動器和掃描驅動器都可以使用相同的反饋信號進行閉環定位。通過結合機械部件和兩種設備類型的驅動信號,混合動力驅動器僅獲取MCS2控制系統的單個通道,這使其成為需要將大行程范圍與精確定位或準確的掃描相結合的應用的經濟高效的解決方案。如果需要更高的掃描頻率,則可以分離粘滑驅動和掃描驅動器的驅動信號。
DLS混合驅動產品系列的各個位移臺是一個全新的定位器系列,旨在與SmarAct模塊化系統完全兼容。寬度為52 mm的混合驅動平臺可與SGO角位移臺和SLS-52線性為一天以及兼容的旋轉臺結合使用。
這種兼容性不僅允許將模塊化系統連接元件與混合驅動位移臺一起使用,而且還可以在多維定位系統中將它們與壓電驅動位移臺并排使用,從而可以為特定定位選擇理想的驅動技術每個軸的任務。如果需要大行程,則SLS產品系列的粘滑驅動位移臺是一種經濟高效的選擇。而當需要較大的行程范圍和較大的掃描范圍時,DLS混合驅動器都是理想解決方案。


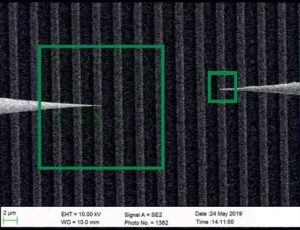
應用實例
| XYZ DLS-3232 | XYZ SLS-3232 | |
|---|---|---|
| 驅動類型 | 混合型 | 粘滑驅動 |
| 自由度 | 3 | 3 |
| 線性位移臺XYZ | DLS-3232 | SLS-3232 |
| 行程XYZ[mm] | 21 | 21 |
| 掃描范圍XYZ [μm] | >10 | >1.5 |
| 有效載荷[N] | 1.5 | 1.5 |
| 分辨率MCS2 [nm] | 1 (S) | 1 (S) |
| 尺寸[mm],?長?x?寬?x?高 | 47 x 32 x 37 | 47 x 32 x 35 |